新方法让微型机器人和手术器械实现体内精确定位
发布时间:2024-04-03 10:43:41来源:
在未来的医学中,微型机器人将在组织中独立导航,医疗仪器将在手术过程中指示它们在体内的位置。两者都要求医生能够精确、实时地定位和控制设备。
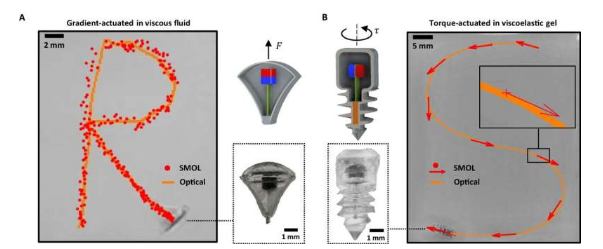
到目前为止,还没有合适的方法。德国癌症研究中心 (DKFZ) 的科学家现在描述了一种基于振荡磁铁的信号发送方法,可以显着改善此类医疗应用。
该研究发表在《npj Robotics》杂志上。
直到最近听起来还像科幻小说的东西现在已经在开发中取得了很大进展:在体内独立移动的纳米机器人有望运输药物、在组织中进行测量或执行外科手术。可以通过肌肉、眼睛玻璃体或血管系统进行导航的磁驱动纳米机器人已经被开发出来。
然而,缺乏复杂的系统来实时跟踪和控制机器人在身体深处的活动。传统的成像技术仅适用于有限的范围。磁共振成像(MRI)的时间分辨率有限,计算机断层扫描(CT)与辐射暴露有关,声波的强散射限制了超声波的局部分辨率。
(责编: BAZHONG)
版权声明:网站作为信息内容发布平台,为非经营性网站,内容为用户上传,不代表本网站立场,不承担任何经济和法律责任。文章内容如涉及侵权请联系及时删除。




